

What We do
Quality high-tech software development
Liquid Dragon has been helping companies develop new software technologies since 2004. We custom tailor our solutions to your project needs and work with you to ensure you attain your goal.
Developing new solutions to complex problems is what we do best. Any opportunity to dive into new technology is always a welcome challenge. We bring years of expertise in many high-tech fields and can quickly adapt to your specialized needs.
Developing new solutions to complex problems is what we do best. Any opportunity to dive into new technology is always a welcome challenge. We bring years of expertise in many high-tech fields and can quickly adapt to your specialized needs.

Graphics rendering and data imaging

Real-time physics simulation

Interactive virtual environments
Computational Fluid Dynamics

Code performance optimization

Artificial Intelligence
We adapt our work methods to ensure the maximum convenience for your business model. We will work with you on or off-site and will scale our services to match your exact needs.
- Turn-key software solutions.
- Contract programming services.
- Consulting.
Who we are
We are Seattle area developers, with decades of experience. We have worked in a wide variety of industries, every time tackling companies' most complex issues on the cutting edge of research. We adapt to new problems quickly and love the challenge.
OUR PARTNERS
Over the years, we have developed a large number of novel solutions for our partners in a wide range of industries.

We have partnered with Monolith Productions on many projects developing high level graphics and simulation features as well as doing work as varied as platform ports and low level code optimization.
We developed a complete real-time deformable soft-body physics solution for Mimic Technologies. Features include support for non-linear constitutive models, accurate cutting, self-collision and full interaction with surgery instruments. Several surgical exercises were developed using this platform.

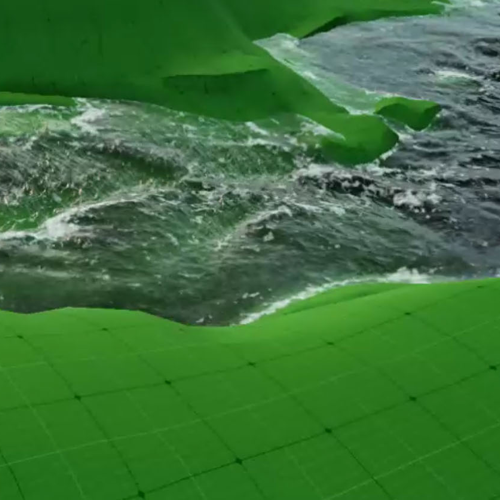
Work for the Discovery Channel included developing an FFT based ocean wave model and buoyancy simulation.

We helped Softkinetic leverage their time-of-flight depth sensor technology and use it as a real-time man-machine interface for a soccer simulation. We also provided them with a real-time 3D rendering engine for their project.

Work for WB included 3D graphics rendering development and performance optimization.

We developed a 3D graphics engine that could run on next-generation platforms for Signal studios' latest project.

We developed a complete cloud-based client-server solution for Moprise's product. This included the client side code for PC and cell phones as well as the Linux cloud server side.

We helped Gryptonite use new depth sensor and gyroscope/accelerometer based technology in their project.

We provided midway with performance optimization and debugging services.

We provided Surreal Software with low level performance analysis and optimizations on a large world simulation project.
CONTACT
CONTACT ADDRESS
Liquid Dragon Studios
1275 12th Ave NW, Suite 14
Issaquah, WA 98027
Liquid Dragon Studios
1275 12th Ave NW, Suite 14
Issaquah, WA 98027
SEND
